Table of Contents
Annotation (cz) Annotation (en) Submission system Forum Schedule Students: CZ EN
Geometry of Computer Vision and Graphics (Summer 2020)


He who loves practice without theory is like the sailor who boards ship without a rudder and compass and never knows where he may cast. — Leonardo Da Vinci (1452-1519)
And since geometry is the right foundation of all painting, I have decided to teach its rudiments and principles to all youngsters eager for art. — Albrecht Durer (1471-1528)
As for everything else, so for a mathematical theory: beauty can be perceived but not explained. — Arthur Cayley (1821–1895)
Content
We will explain the basics of Euclidean, Affine and Projective geometry and show how to measure distances and angles in a scene from its images. We will introduce a model of the perspective camera, explain how images change when moving a camera and show how to find the camera pose from images. We will demonstrate the theory in practical tasks of panorama construction, finding the camera pose, adding a virtual object to a real scene and reconstructing a 3D model of a scene from its images. We will be building on our previous knowledge of Linear algebra and will provide fundamentals of geometry for computer vision, computer graphics, image processing and object recognition.
Lectures: Monday 12:45-14:15, KN:E-126 (See the Forum for updates!)
Lecturer: Tomas Pajdla
Main lecture material: Tomas Pajdla: Elements of Geometry for Computer Vision
| Orig. Week | Date | Content [Online Teaching via CTU MS Teams Channel] |
|---|---|---|
| 01 | 17.2. | Intro: Geometry of CV & G, LA, [Sec. 2.1], image coordinate system [Sec. 5] |
| 02 | 24.2. | Mathematical model of the perspective camera [Sec. 6] |
| 02.3. | Cancelled | |
| 03 | 09.3. | Camera calibration [Sec. 7] and pose [Sec. 4] |
| 16.3. | Cancelled | |
| 04, 05 | 23.3. | Calibrated camera pose computation I & II [Sec. 7.2, 7.3] |
| 06 | 30.3. | Homography [p.60-62 Sec. 8.1 & par.1 + p.64-67 Sec. 8.2.1 & 8.2.2. + p.73-75 Sec. 8.4 + p.76-78 Sec. 8.6.1], Lecture video |
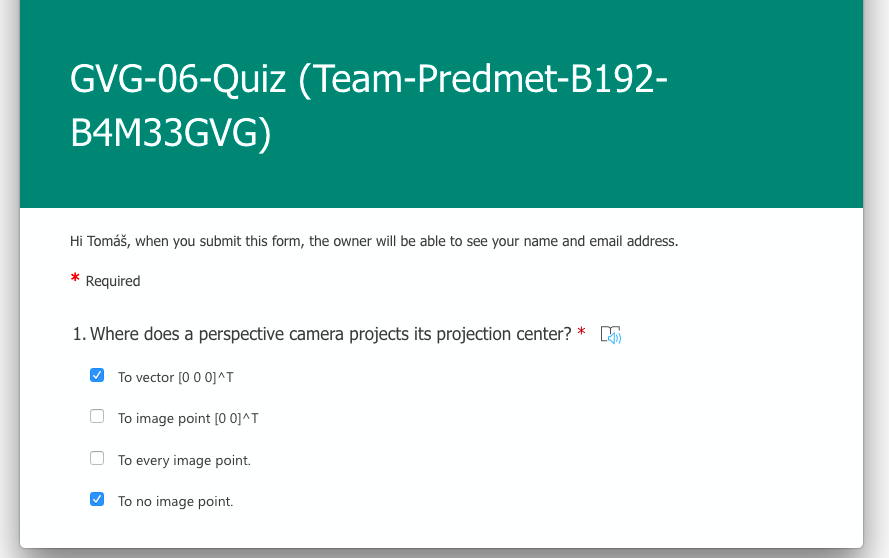
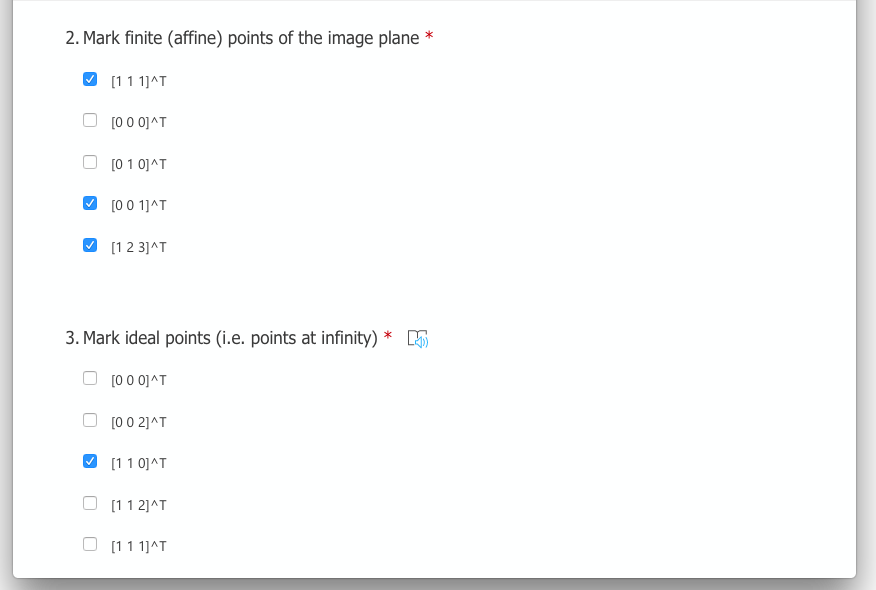
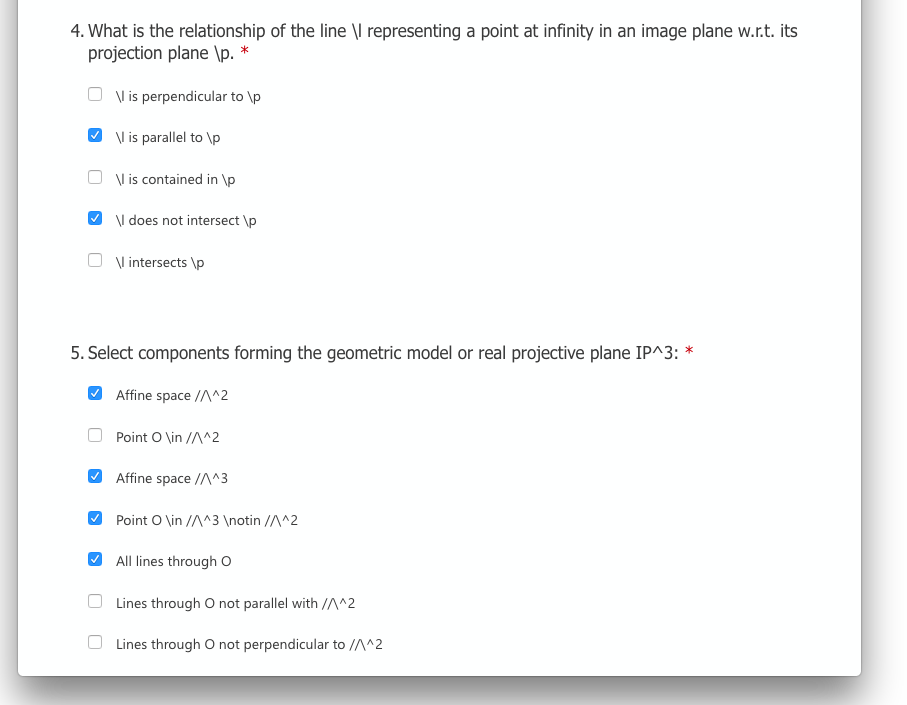
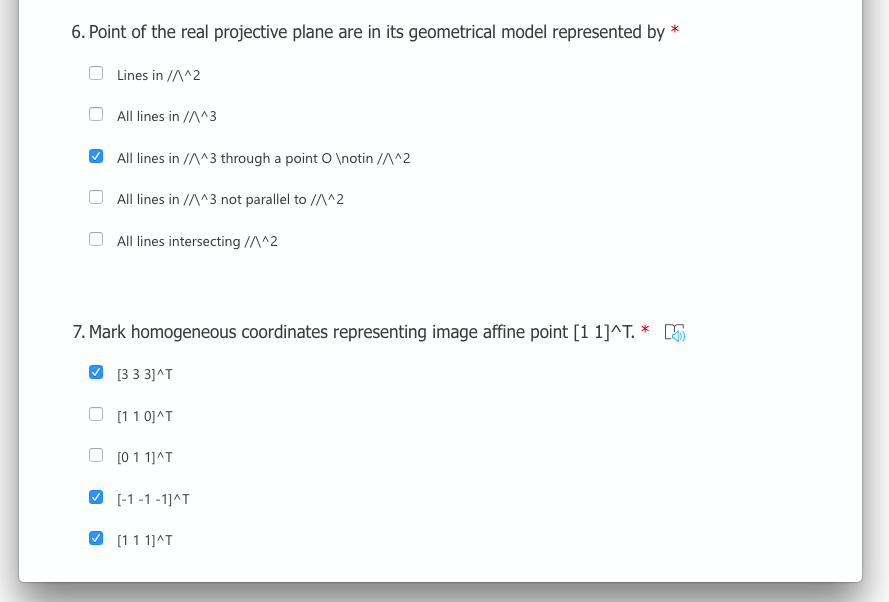
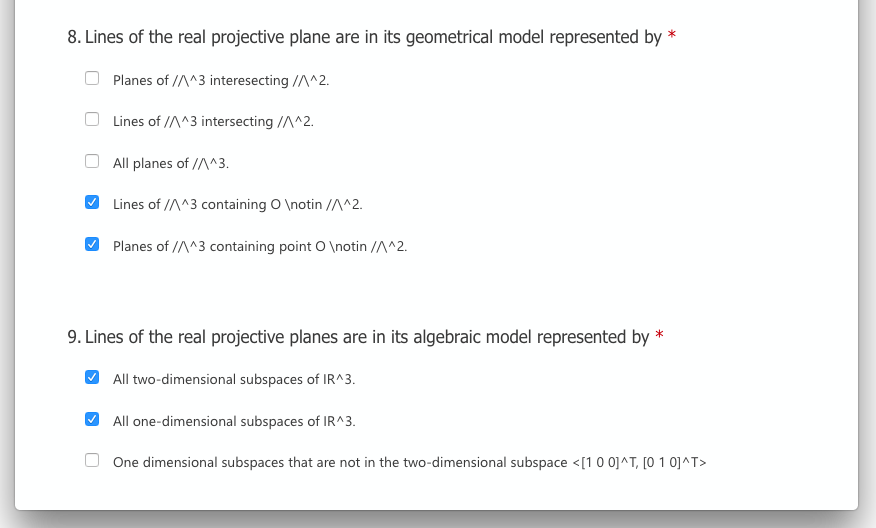
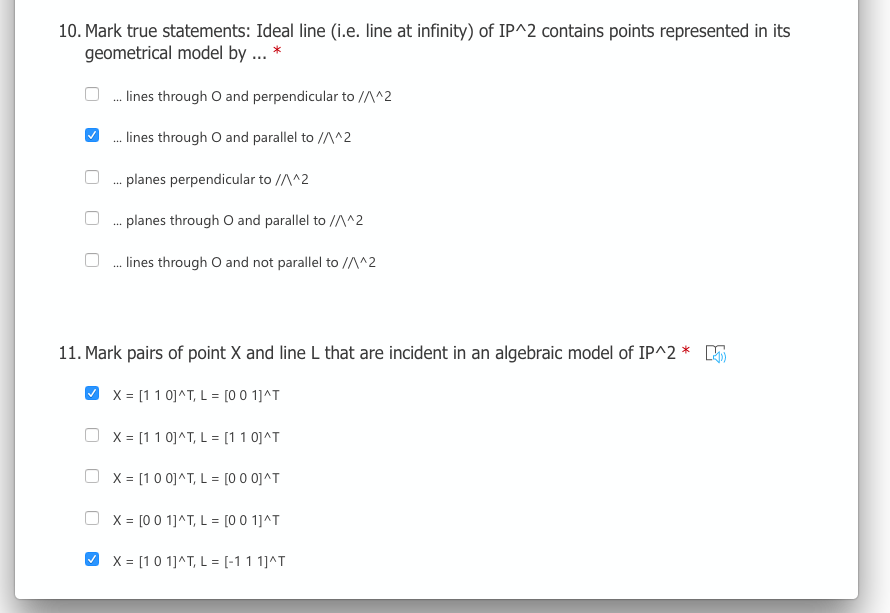
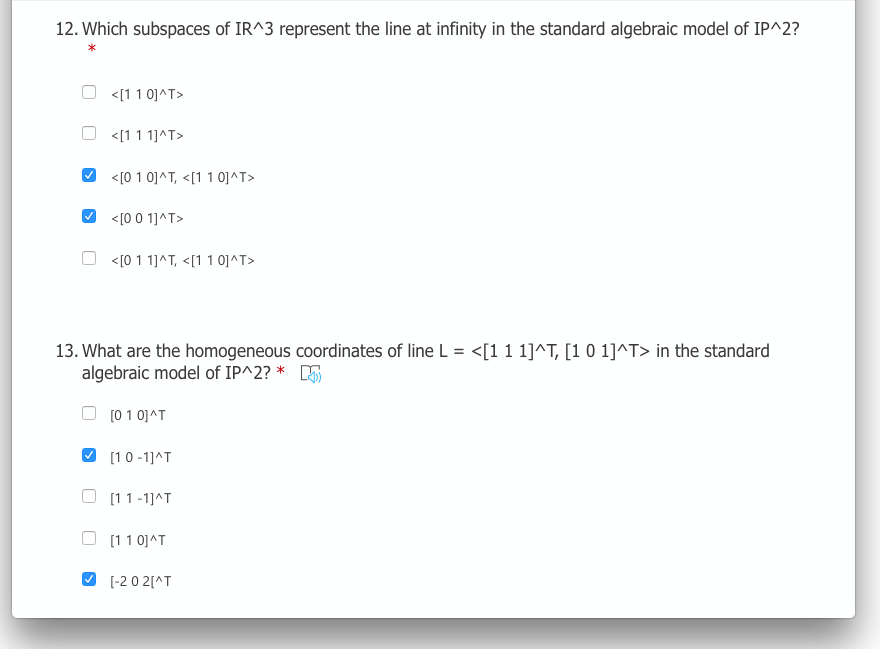
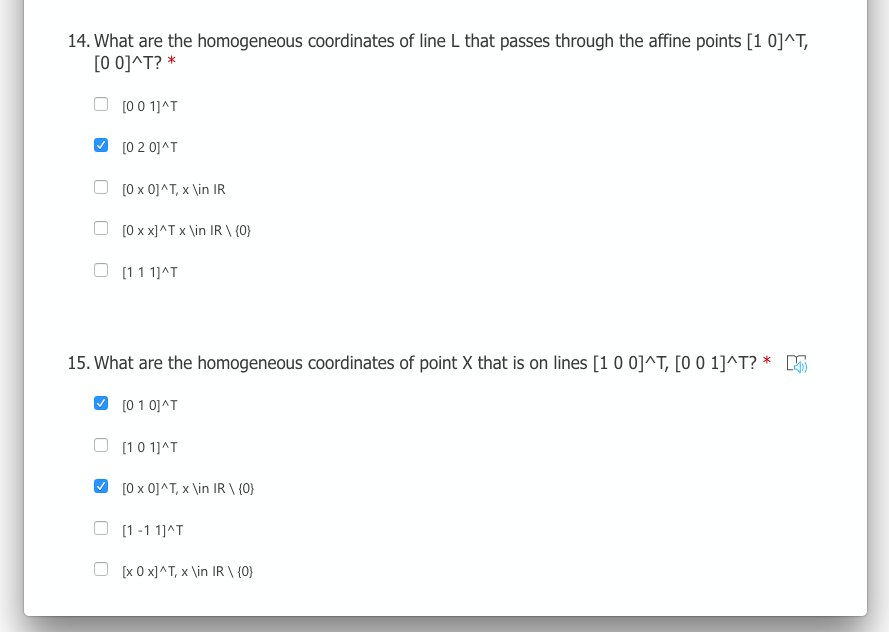
| 07 | 06.4. | Projective plane [p. 85-100], Lecture video 1 + Quiz 1 [1,2], Video 2 + Quiz 2 [3, 4, 5, 6], Video 3 + Quiz 3 [7,8,9] |
| 08 | 13.4. | Easter Monday |
| 09 | 20.4. | Vanishing points [Sec. 9.4] line [Sec. 9.5], Projective space [Sec. 10] Camera calibration from vanishing points [Sec. 11], Notes, Video 1, Video 2 |
| 10 | 27.4. | Determinant [Sec. 2.3], Dual space [Sec. 2.4], Meet and Join under Homography [Sec. 9.3.1, 9.3.2., 9.3.3.] Notes, Video |
| 11 | 4.5. | Epipolar geometry [Sec. 12.1-12.3] Notes, Video |
| 12 | 11.5. | 3D reconstruction with a calibrated camera [Sec. 12.4] Notes, Video |
| 13 | 18.5. | Calibrated camera motion computation [Sec. 12.5], SVD [Sec. 2.3] Notes, Video |
| 14 | 25.5. | Questions & Answers |
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Exercises: Monday 14:30-16:00, 16:15-17:45 in KN:E-230
Teachers: Martin Matoušek, Michal Polic
Details about exercises (technical content and assessment) are in the separate section Labs.
Assesment (zápočet)
- All home works must be submitted and accepted (0 in the column ~HW)
- At least 50% of points in total from the home works (at least 0.5 in the column HW).
- At least 50% of points in total from the tests (at least 0.5 in the column T).
- Regular submission of home works ends on May 25, 2020. Later submissions are possible only by agreement with teaching assistants.
- All the above conditions have to be fulfilled and the results have to be recorded in the Submission system before coming to the exam.
Exam
The exam consists of a written and an oral part.
- It is required to achieve at least 50% of points from the written part of the exam to be admitted to the oral part of the exam.
- The final grade depends on the exam (40%), tests (30%), and home works (30%) as given below (Actual weights of individual home works and tests may be set according to their relative difficulty).
- Lack of understanding of fundamental principles and concepts may lead to Fail grade independently from the number of points achieved.
Points P a are calculated as
P = 100*(0.3*H/(9*5) + 0.3*T/(3*10) + 0.4*(0.5*we + 0.5*oe))
where H and T are points for home works and tests, and we and oe are success rates for oral exam and written exam, respectively. The grade is given by the points P and the table below.
| Grade | Points (P) |
|---|---|
| A (Excellent) | >= 90 |
| B (Very good) | [80,90) |
| C (Good) | [70,80) |
| D (Satisfactory) | [60,60) |
| E (Sufficient) | [50,60) |
| F (Failed) | < 50 |
Exam content:
- Linear algebra: linear space, basis, coordinates, linear dependence/independence, matrices, rank, determinant, eigenvalues and eigenvectors, solving systems of linear equations, Frobenius theorem and linear independence, linear function, affine function, linear mapping and its matrix, computing roots of a polynomial via eigenvalues of its companion matrix, dual space, dual basis, change of the dual basis corresponding to a change of a basis, vector product and derived linear mappings, SVD, dual space and dual basis.
- Course material: GVG-2020-Lecture.pdf.
Rules
- Lecture: It is very difficult to pass the course without attending lectures.
- Labs: It is impossible to pass the course without attending labs.
- Home works: Home works are assigned at a lab where they can be discussed with teaching assistants. Students work out homweorks independently (rulesin Czech). The deadline for submitting a homework is on the next Monday 6:00 in the morning. Late submissions are penalized (10% for each commenced day of delay but not more than 50% of points).
- Assesment: see above.
- Tests: Students work out tests independently.
Literature
- G. Sanderson. Essence of Linear Algebra from 3Blue1Brown
- Interactive Linear Algebra Course LA @ immersivemath.com.
- P. Olšák. Úvod do algebry, zejména lineární. ČVUT 2007.
- P. Pták. Introduction to Linear Algebra. Vydavatelství ČVUT, Praha, 2007.
- Maple - A0B01MVM Matematika v Maple Installation
- R. Hartley and A.Zisserman. Multiple View Geometry in Computer Vision. Cambridge University Press, 2003.
- C Daniilidis, J Shi. Robotics: Perception Coursera Online Course
Contacts
| Lecturer: Tomas Pajdla | Labs: Martin Matoušek | Labs: Michal Polic |
pajdla@cvut.cz | Martin.Matousek@cvut.cz | policmic@fel.cvut.cz |
| Dejvice, CIIRC, room B-638 | Dejvice, CIIRC, room B-606 | Dejvice, CIIRC, room B-640B |
 |  |  |