Linear and Non-linear Filtering
The two following labs deal with filtration of images, which can be used for smoothing, deblurring, denoising and other applications.
The theory behind the labs can be found in the lectures:
Start by downloading the template of the assignment.
Use test_script.m to check your solution.
Brute-force convolution and simple kernels
1a: implement brute-force convolution using loops (convolution_2D.m) - 2 points
Note that the input kernels can have general 2D shape (not just square matrices).
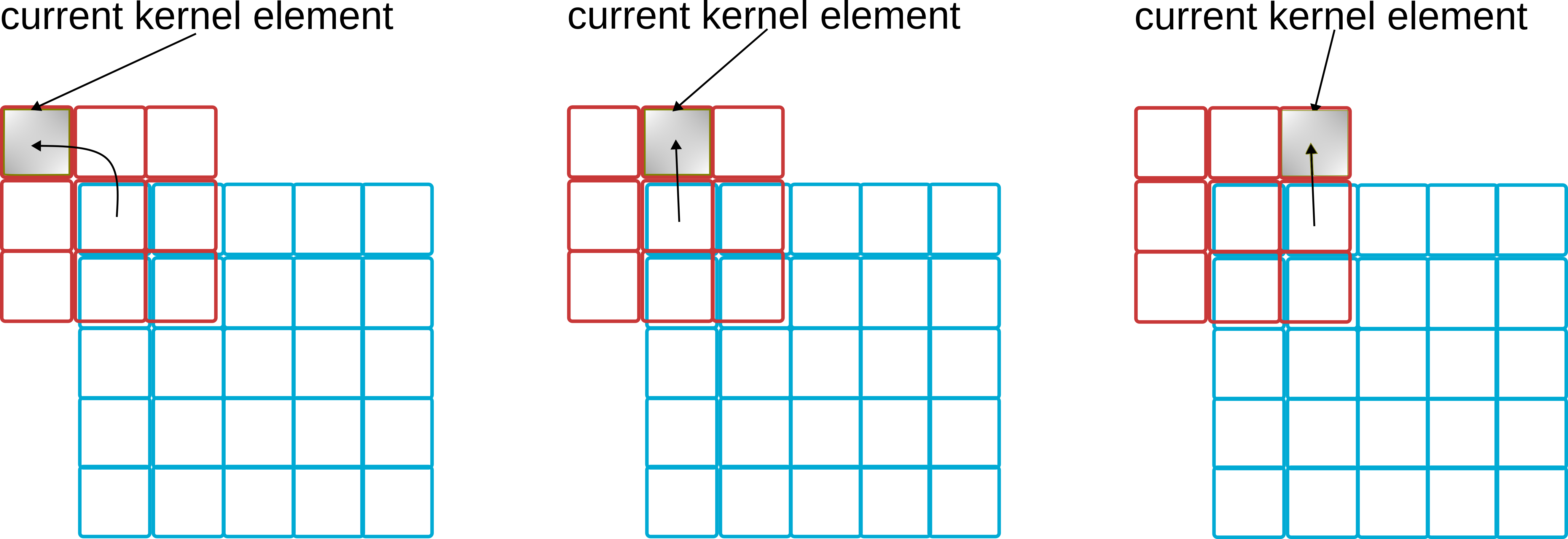
Use “DC” (a.k.a. repeat or replicate) padding, i.e., clip the pixel coordinates just to the area of the original image. For the pixels in areas, where the kernel would look outside of the original image, use the nearest image pixel.
Here is a visualization of an edge case.
Your code should have 4 nested loops. The inner-most loop will perform multiplication between exactly one kernel and one image element.
Remember to offset the kernel properly.
(Weird) differences from the reference solution around edges are often because of problems with padding or proper kernel positioning (offset).
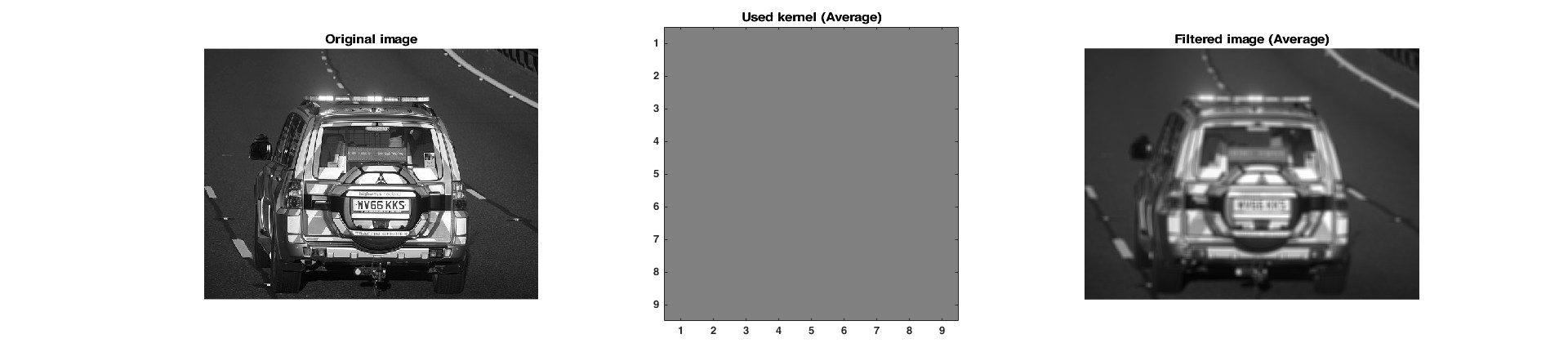
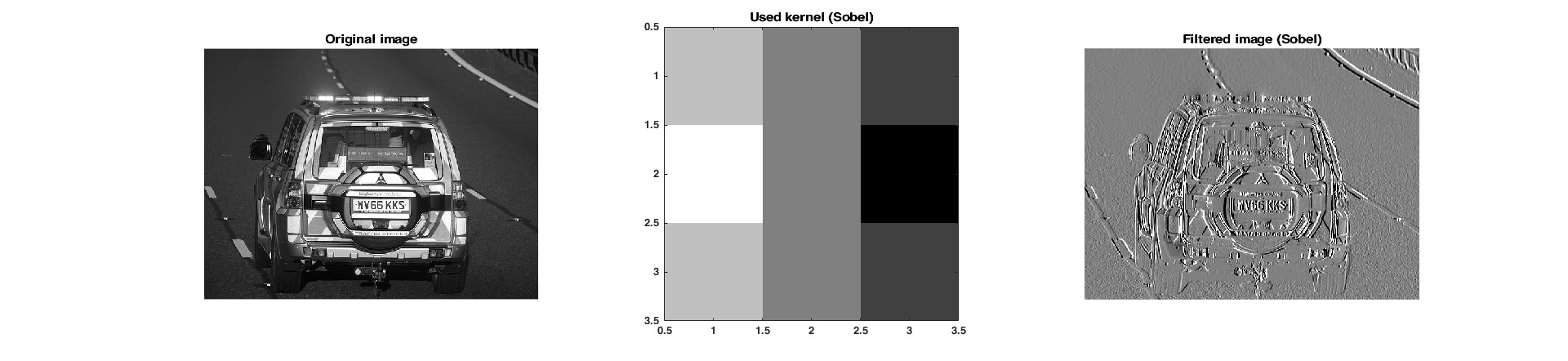
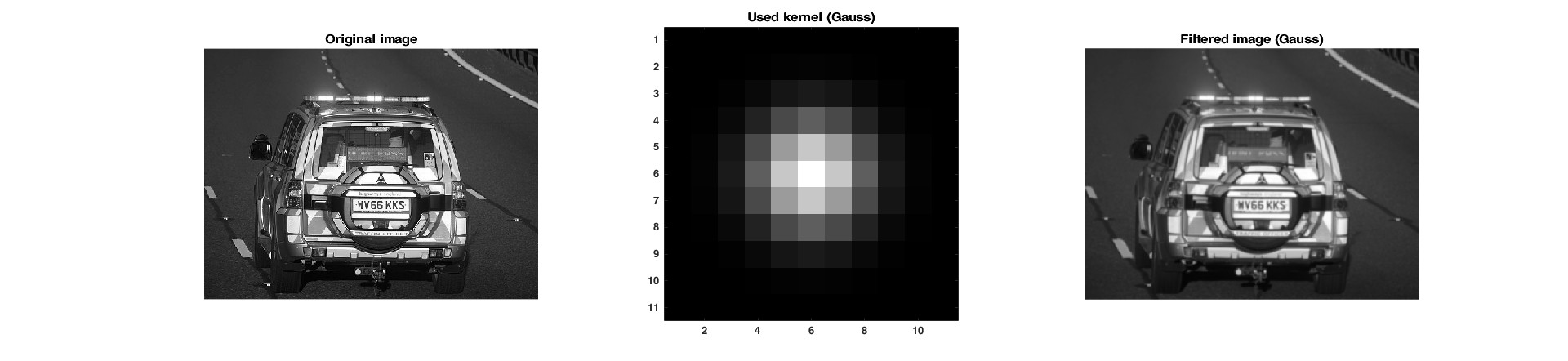
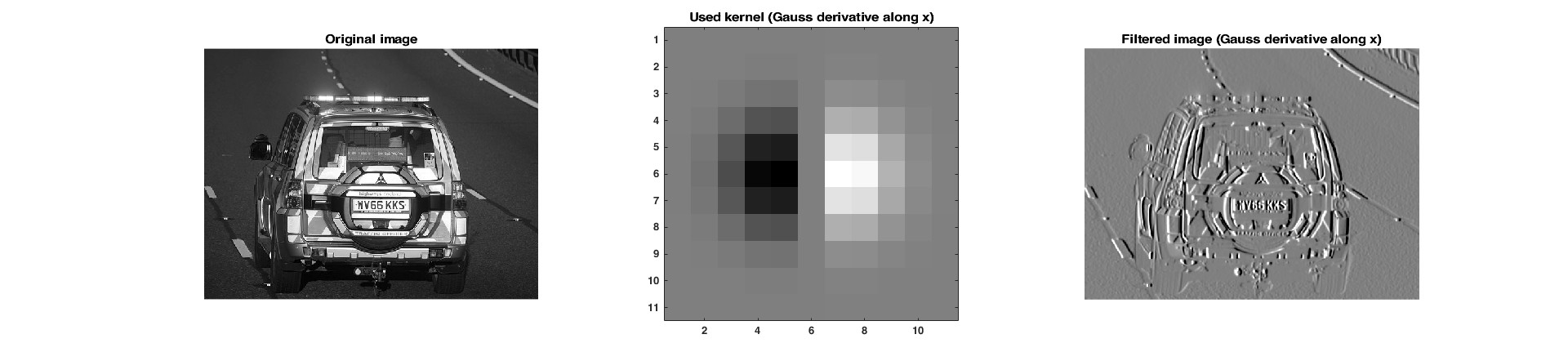
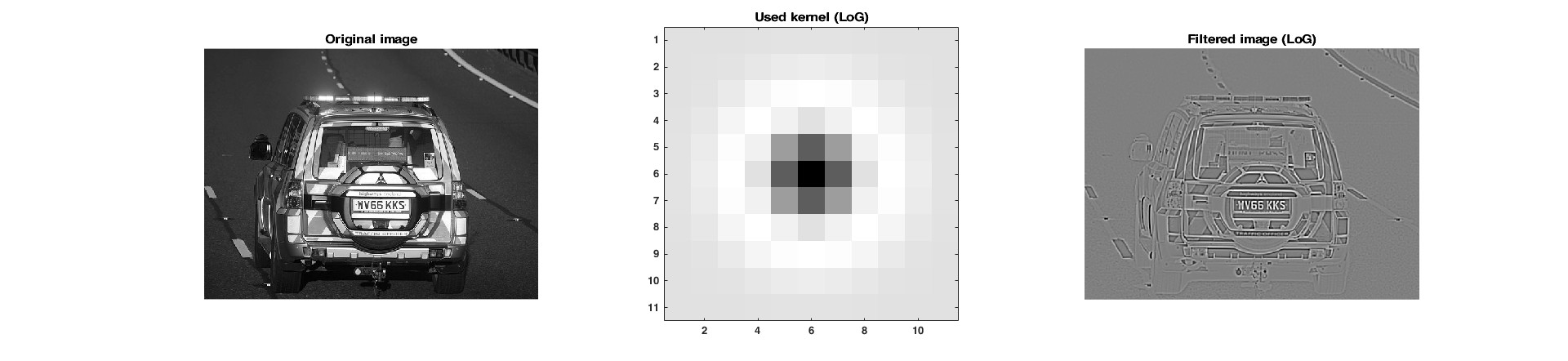
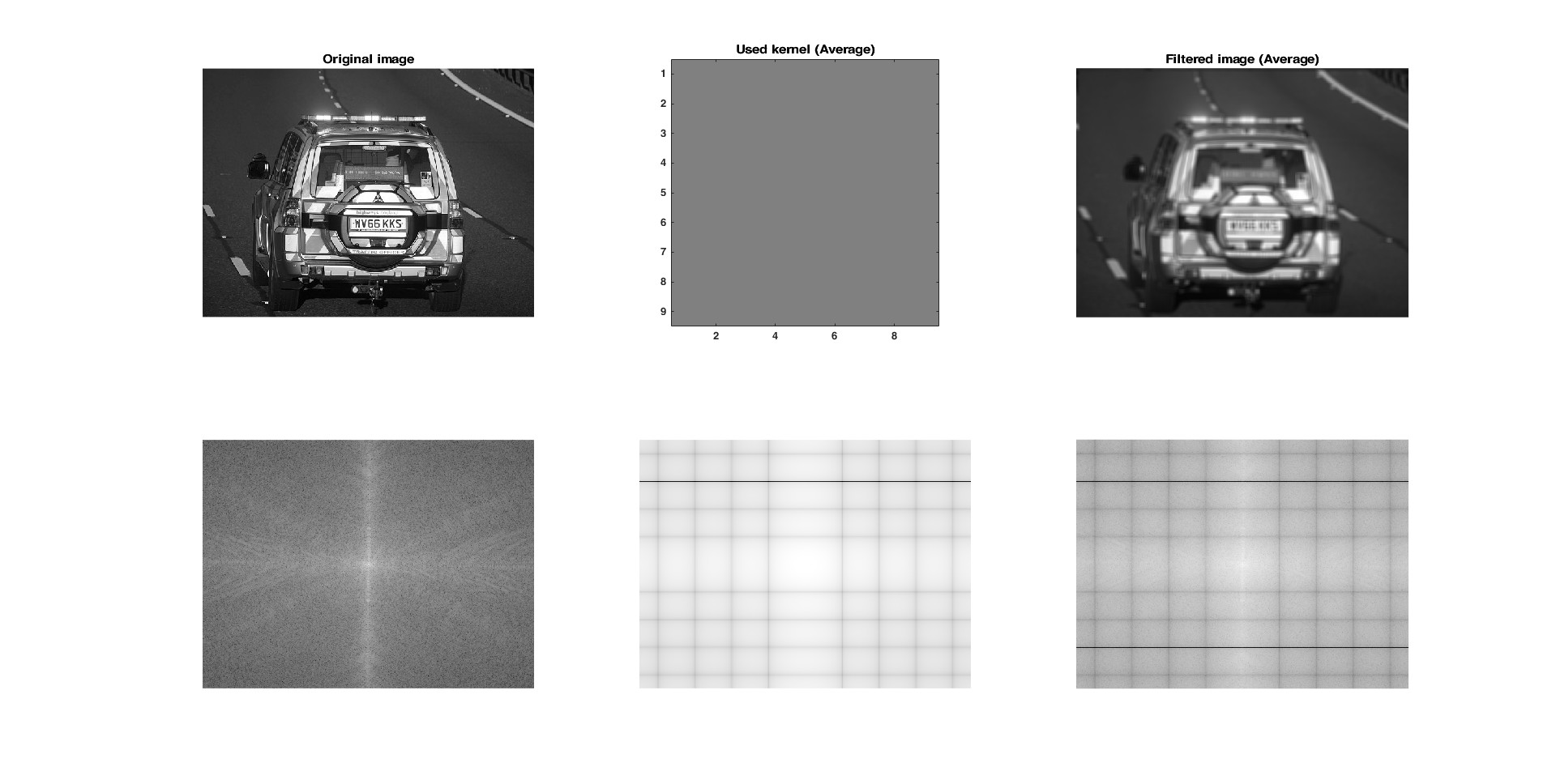
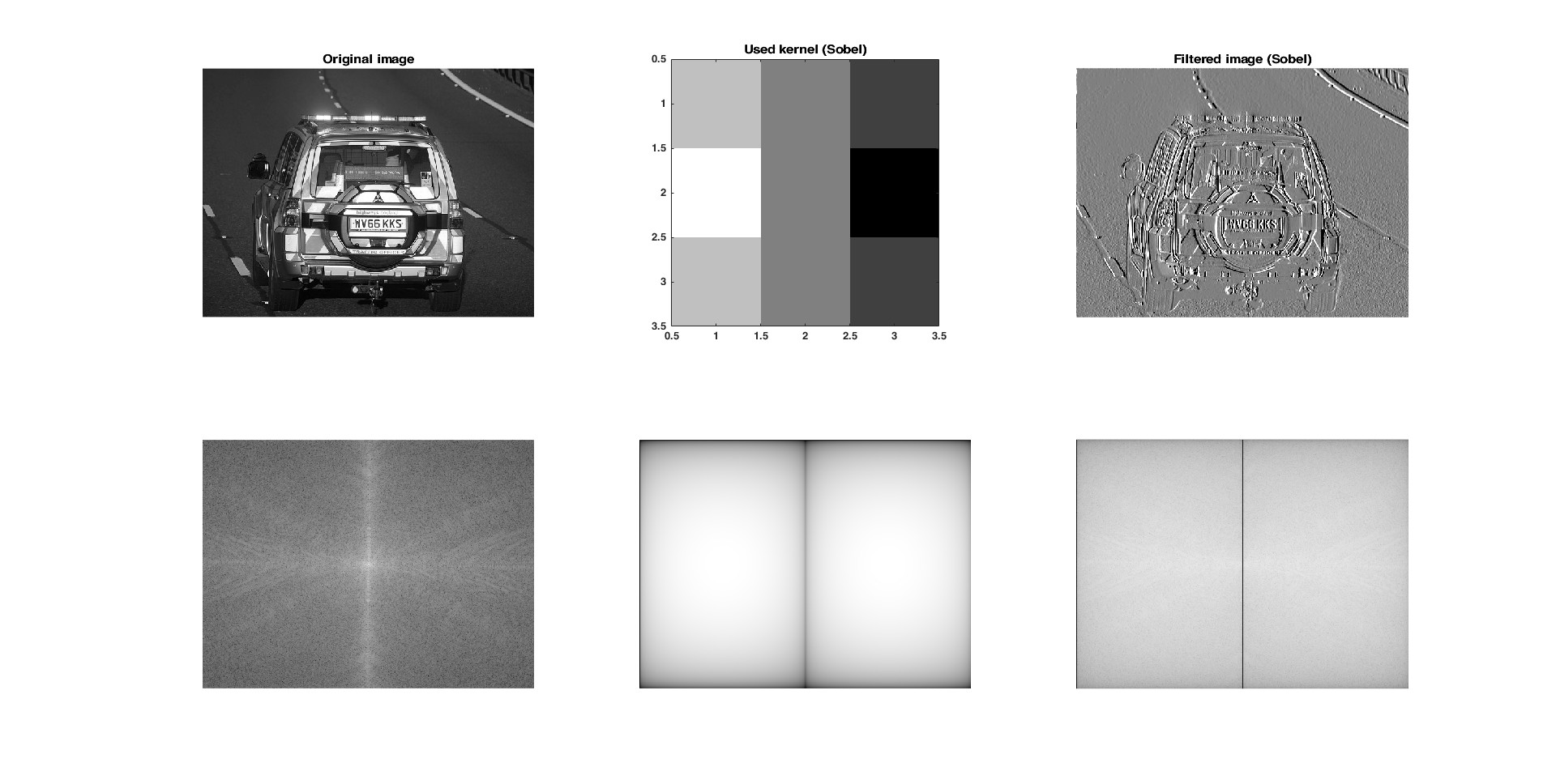
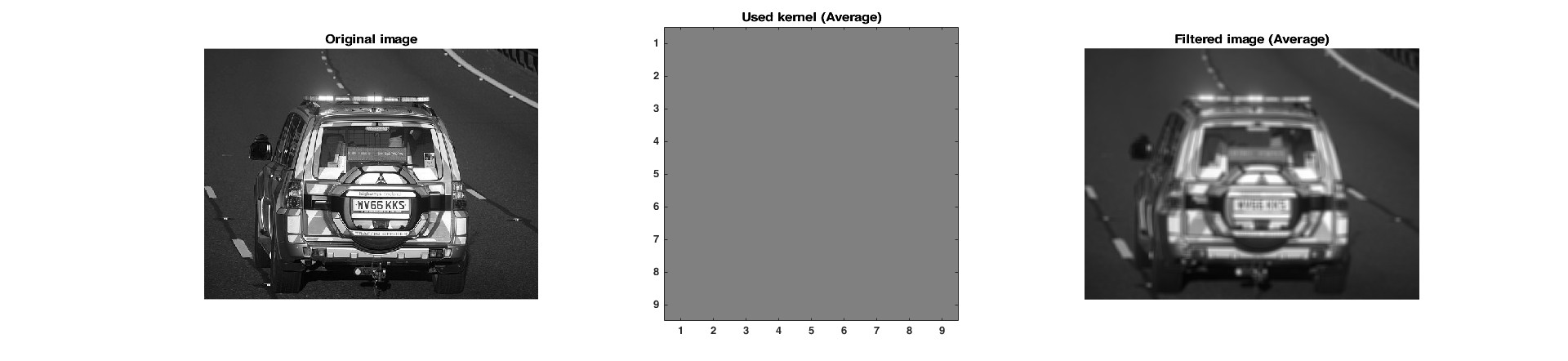
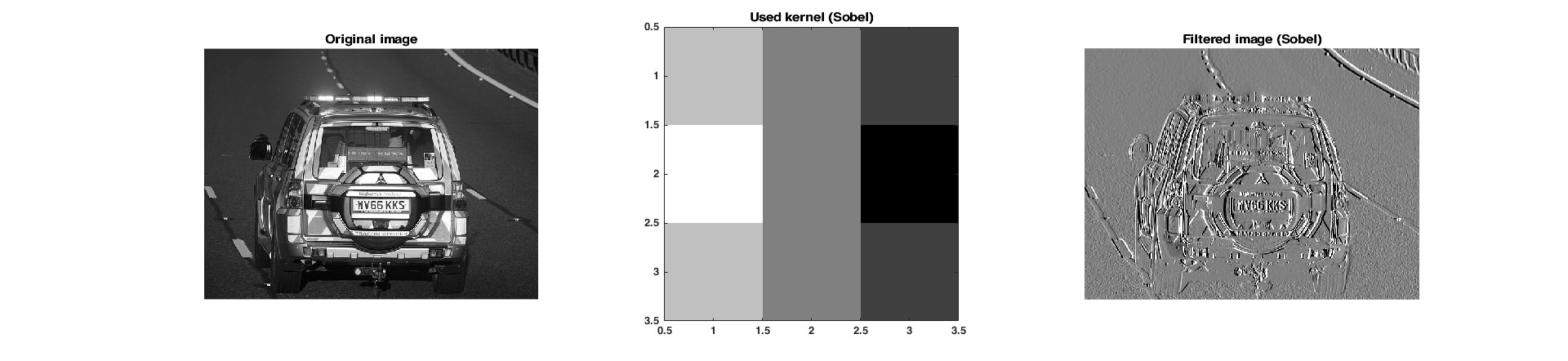
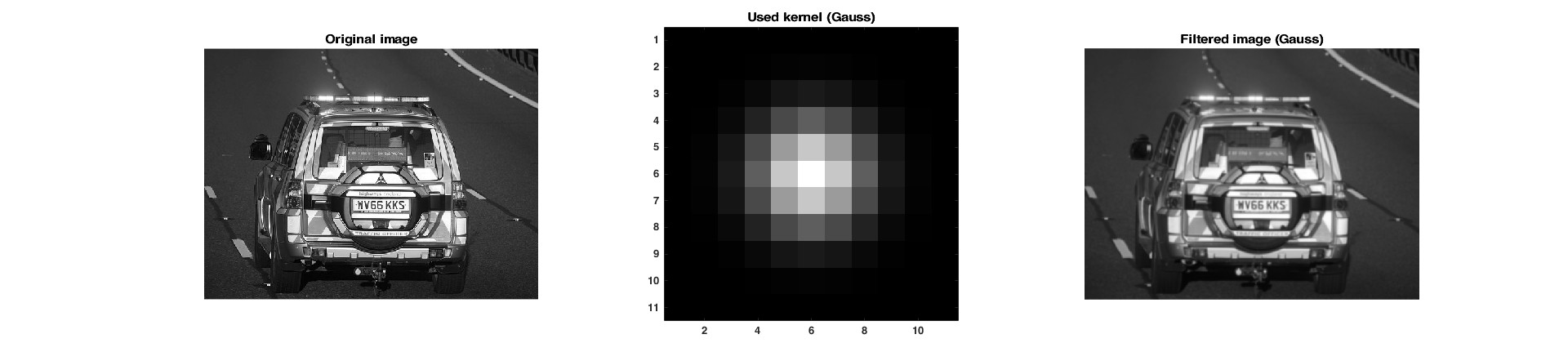
1b: implement the generator for specified kernels (get_kernel.m): - 0.2 point / kernel - 1 point total
Implement the following kernels: average, Sobel, Gauss, Gauss derivation, Laplacian of Gaussian
Note that there are many other commonly used simple kernels. Check, e.g.,
Wikipedia for few examples.
Remember to normalize kernels (where applicable)
There are different ways to compute certain kernels. For example, Gaussian kernel functions roughly the same with and without the normalizing factor (the spread of the distribution will be slightly different). Therefore, your solution might look like it is using a different sigma than the reference. That is OK.
If your Sobel operator or Gauss derivation are mirrored relative to the reference solution, it is OK. You can find both definitions in literature.
Compare your results to the reference:
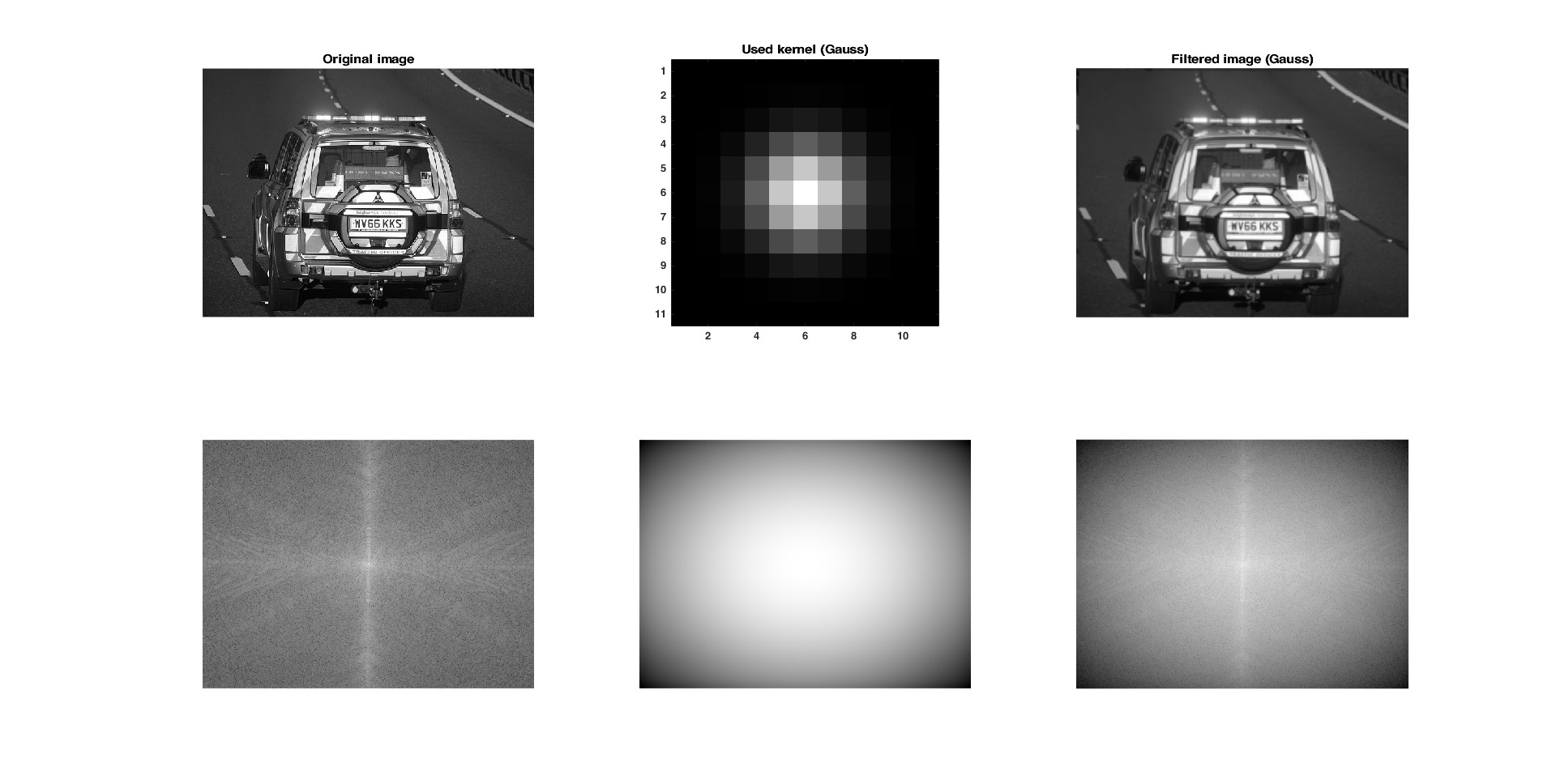
2: implement convolution using Fourier Transform (convolution_ft.m) - 1 point
Compare your results to the reference:
Convolution with separable kernels
3: implement the generator of selected separable kernels (get_kernel.m) - 0.5 point / kernel - 1.5 points total
Check If the results match the outputs of your standard kernel implementations.
Again, remember proper normalization.
Compare your results to the reference:
Sharpening with Wiener filter
4: implement Wiener filter (wiener_filt.m) - 2 points
Compare your results to the reference:
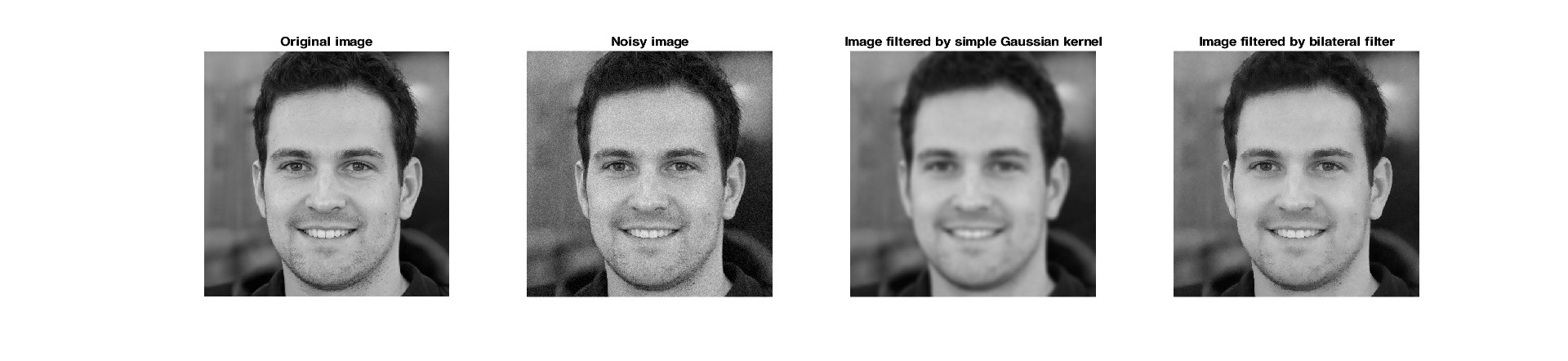
Denoising with bilateral filter
5: implement basic Bilateral filter (bilateral_filt.m) - 2.5 points
Compare your results to the reference:
When you are done, upload the complete zip archive containing your implemented files to BRUTE:
bilateral_filt.m
convolution_2D.m
convolution_2D_ft.m
get_kernel.m
wiener_filt.m
Keep the files in the root of the zip archive (zip directly the files, NOT a folder containing the files). The evaluation system searches for the files just in the root of zip archive.
The points will be assigned manually by TA after the deadline.
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}