Homework 09 - Metric reconstruction
This homework is split into two weeks.
Essential matrix
Having a fundamental matrix F and camera calibration K, the essential matrix E can be computed from the equation
<latex>F = K^{-\top} E K^{-1}\,.</latex>
First, matrix E1 is computed as:
E1 = K' * F * K;
Due to errors in data used to estimate F and/or K, the obtained matrix E1 is not a true essential matrix, its two non-zero singular values are not equal. So the matrix must be modified in order to make these singular values equal:
[U D V] = svd( E1 ); D(2,2) = D(1,1); E = U * D * V';
To summarize, starting with regular matrix G obtained from the 8-point algorithm, we apply SVD two times. First, G is decomposed, the smallest singular value zeroed and F is composed. Secondly, K is applied, E1 is decomposed and the two singular values are made equal giving raise to essential matrix E. Finally, K can be applied to compute a fundamental matrix Fe consistent with K from E.
Steps
Find two essential matrices. A possibly bad Ex and the best E
- Compute essential matrix
Exusing your best fundamental matrixFestimated in HW-09 and internal calibration K.mat from HW-04. Compute also the fundamental matrixFxconsistent withKfromExandK - Draw the 12 corresponding points (from HW-09) in different colour in the two images. Using
Fx, compute the corresponding epipolar lines and draw them into the images in corresponding colours. Export as09_egx.pdf. - Draw graphs of epipolar errors
d1_iandd2_iw.r.tFxfor all points. Draw both graphs into single figure (different colours) and export as09_errorsx.pdf. - Find essential matrix
Eby minimizing the maximum epipolar error of the respective fundamental matrixFeconsistent withKusing the correspondences from HW-09:- Generate all (495) 8-tuples from the set of 12 correspondences and estimate fundamental matrix
F(viaG) for each of them. - Compute fundamental matrix
Feconsistent withKfromEandKand its epipolar error over all matches. - Choose the
FeandEthat minimize maximal epipolar error over all (i.e. the 12 + the mesh) matches.
- Draw the 12 corresponding points in different colour in the two images. Using
Fe, compute the corresponding epipolar lines and draw them into the images in corresponding colours. Export as09_eg.pdf. - Draw graphs of epipolar errors
d1_iandd2_iw.r.tFefor all points. Draw both graphs into single figure (different colours) and export as09_errors.pdf. - Save
F,Ex,Fx,E,Feandu1,u2,point_sel(same as in HW-09) as09a_data.mat.
Cameras and reconstruction
- Decompose the best
Einto relative rotationRand translationC(four solutions). Choose such a solution that reconstructs (most of) the points in front of both (computed) cameras. - Construct projective matrices
P1,P2(includingK). - Compute scene points
X. - Manually create set of at least 30 edges connecting the points. The edges should correspond to real edges in the scene.
- Display the images, draw the input points as blue dots and the scene points
Xprojected by appropriateP_ias red circles. Draw also the edges, connecting the reprojected points as yellow lines. Export as09_reprojection.pdf. - Draw graph of reprojection errors and export as
09_errorsr.pdf. - Draw the 3D point set connected by the edges as a wire-frame model. From the top, from the side, and from some general view. Export as
09_view1.pdf,09_view2.pdf, and09_view3.pdf. - Save
Fe,E,R,C,P1,P2,X, andu1,u2,point_selas09b_data.mat.
| Example of the corresponding points and edges | Example of a wire-frame model reconstruction |
|---|---|
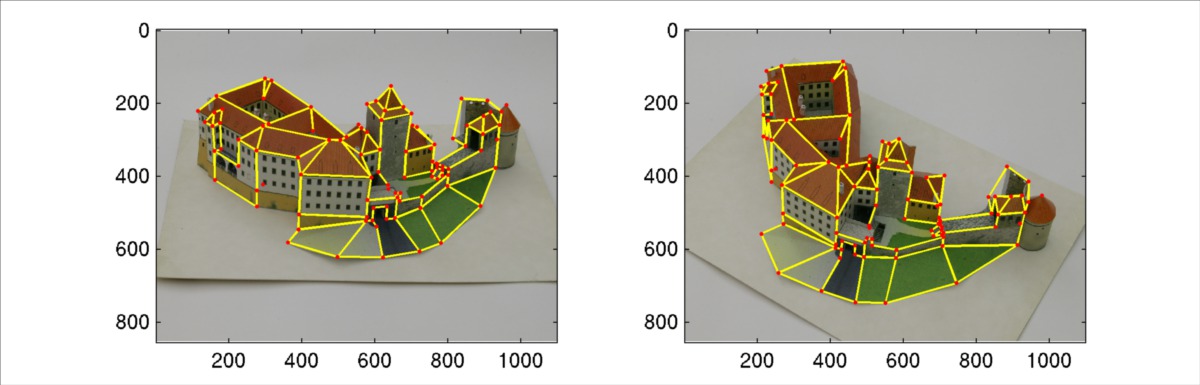 |  |
Upload
The first part: upload an archive consisting of:
09_errorsx.pdf,09_errors.pdf09_egx.pdf,09_eg.pdf09a_data.mathw09a.m– your Matlab implementation entry point.- other files required by hw09a.m
The second part: upload an archive consisting of:
09b_data.mat09_reprojection.pdf09_errorsr.pdf09_view1.pdf,09_view2.pdf,09_view3.pdfhw09b.m– your Matlab implementation entry point.- other files required by hw09.m