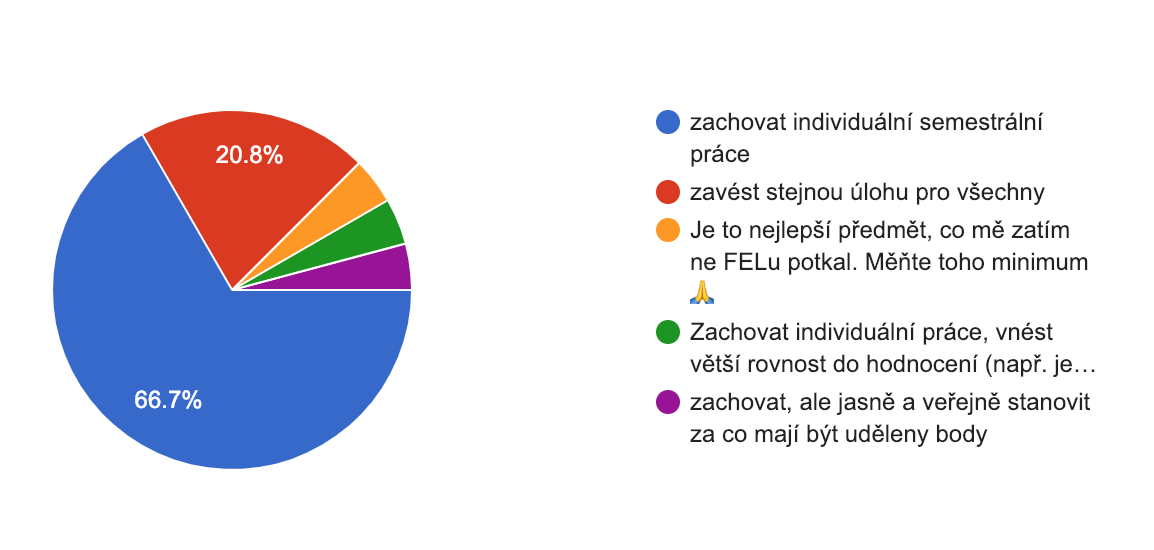
Semestral work voting
Semestral work topics and results
| Supervisor | Topic | Student group | Points | |
 | Karel Zimmermann http://cmp.felk.cvut.cz/~zimmerk zimmerk@fel.cvut.cz | Dve ulohy: KZ1: Segmentace kondenzacni stop letadel, KZ2: 3D detekce a lokalizace objektu detail zadani | KZ1:hejlbenj, pavlisi1 KZ2: zachaji1, cechjos3, minarji3 | KZ1: 3+8+30 = 41 KZ2: 5+10+35 = 50 |
 | Tomas Petricek petrito1@cmp.felk.cvut.cz http://cmp.felk.cvut.cz/~petrito1 | TP1: Traversability Analysis from RGB for Mobile Robot TP2: Volumetric Reconstruction from RGB Stereo and Segmentation TP3: 3D Object Detection Details | TP2:zakhaand seredann davidpe5 TP3:Pospíchal, Turnovec, Smrčka | TP3: 3+7+30 = 40 |
 | Teymur Azayev azayetey@fel.cvut.cz http://cmp.felk.cvut.cz/~azayetey | TA1: Robotic manipulator control. Use pose segmentation network to train a PR2 robot to imitate your movements to solve tasks in a simulator Assignment details. TA2: Controlling a shadowhand simulation from camera input. Use GANs to cross-map simulator and real images of a human hand in order to teach the system to regress joint angles from input photo images, enabling control of the simulation from a simple rgb camera. Assignment details | TA1:gartnjan, doubrpa1, trzilpa1 TA2:zongomil, stefkalad, hrazdja2, hanismar TA3: stetkmat, sramema4, strnavo1 | TA1: 4+7+32 = 43 TA2: 5+10+35 = 50 TA3:4+10+32 = 46 |
| David Coufal (CAS) | david.coufal@cs.cas.cz http://www.cs.cas.cz/coufal/ | Dve temata: DC1 cycle GANs (palms) DC2 BEGAN (faces) detail zadani | DC1:starutom, spacemi6, vancpetr DC2: tefrfili, ungarpet | DC1: 5+10+35 = 50 DC2: 4+10+35 = 49 |
 | David Hurych (Valeo) david.hurych@valeo.com https://cz.linkedin.com/in/david-hurych-phd-1b862b82 | DH1: “Everybody dance now” - GANs for advanced human pose augmentation. 1. Get the code from authors or try to rewrite it. 2. Get the data necessary to train it. 3. Try to re-train with original as well as new data. 4. Use the trained model to have fun and present. links: https://arxiv.org/pdf/1808.07371.pdf https://carolineec.github.io/everybody_dance_now/ https://www.youtube.com/watch?v=PCBTZh41Ris | DH1:zhyliyeh, uklehada, tyleondr | DH1: 1+6+25 = 32 |
 | Otakar Jasek jasekota@fel.cvut.cz https://scholar.google.cz/citations?user=xA8-K9cAAAAJ&hl=en | OJ1: Nauceni odezvy lidaru na ruznych typech objektu. detail zadani |
 | Vojta Salansky salanvoj@fel.cvut.cz http://cmp.felk.cvut.cz/~salanvoj/ | VS1: Mapování a lokalizace na reálném robotu Cílem semestrální práce je simultální mapování a lokalizace reálného robotu (turtlebot) v neznámem prostředí (tzv. SLAM). Studenti si nastudují ROS (Robot Operating System), který je hojně využívaný pro ovládání robotů a zpracování sensorických dat. Využitím hloubkových dat a odometrie sestaví mapu, ve které robot lokalizují. Tato semestrální práce je vhodná pro studenty, kteří si chtějí vyzkoušet řízení reálného robotu a přiučit se něco nového. | VS1: jaluvmar, kochmmi1, dujavjoz | VS1: 1+7+23 = 31 |
 | Matej Hoffman matej.hoffmann@fel.cvut.cz https://sites.google.com/site/matejhof/ | MH1: 3D human pose regression detail zadani | MH1:Lukáš Rustler, Mirek Tržil, Adéla Šterberová | MH1: 5+10+35 = 50 |
 | Tomas Krajnik krajnt1@fel.cvut.cz http://labe.felk.cvut.cz/~tkrajnik/ | TK1: Learneable Feature/Object Detection for Visual Navigation of Mobile Robots: Evaluate the performance of selected feature/object detection methods on the ability of a mobile robot to perform teach-and-repeat navigation in environments which change their appearance over time. To do so, learn to use the `bearnav' navigation system (bearnav.eu), and substitute its point-feature extraction module with methods of your choosing. TK2: Style Transfer for Visual Navigation of Mobile Robots: Use style transfer to generate 'night' images from 'day' ones and 'winter' images from 'summer' ones. Evaluate the impact of these predicted images on the robustness of mobile robot navigation, where the robot is using a map composed of these predicted images instead of a map which is obsolete. For the evaluation, use the 'bearnav' navigation framework (bearnav.eu). | TK1:rozlijak, nguyemi5, zoulamar TK2:bieleluk, pechnmar, obrkmatu | TK1: 5+10+35 = 50 TK2: 4+10+35 = 49 |
 | Martin Pecka http://cmp.felk.cvut.cz/~peckama2/ peckama2@fel.cvut.cz | MP1: Convolutional Networks with Uncommon Data Inputs detail zadani | ||
 | Babak Mahdian (UTIA) http://zoi.utia.cas.cz/mahdian} mahdian@utia.cas.cz |